3Dモデル作成@Solidworks
モデリング
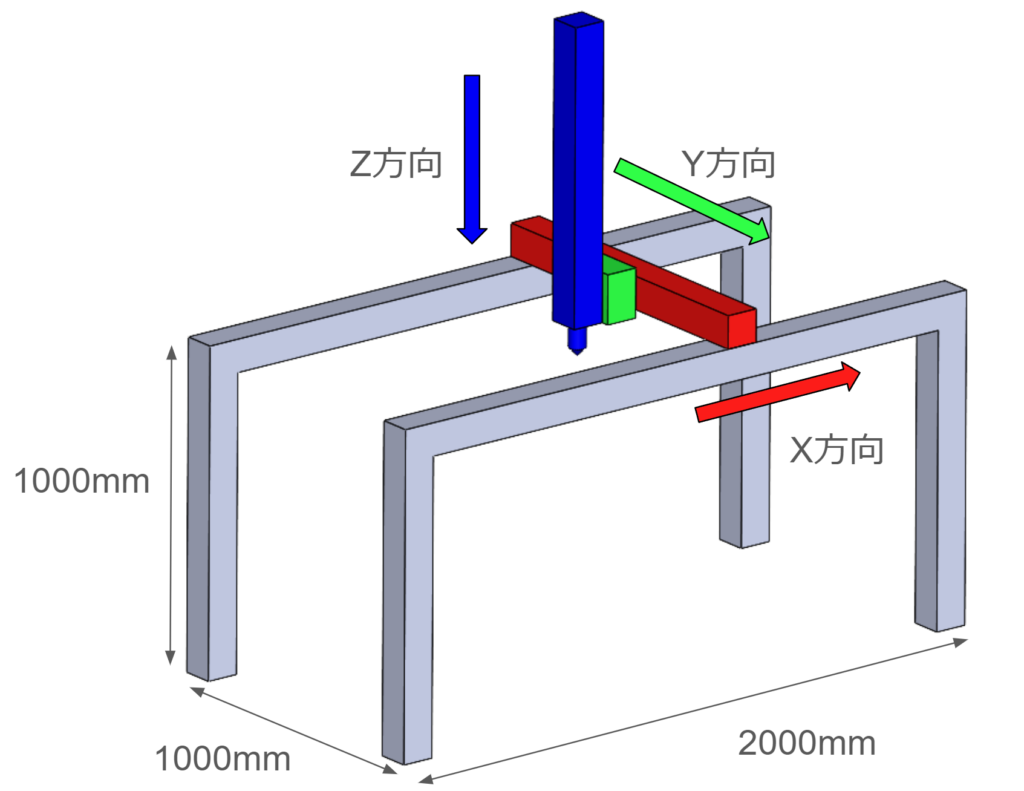
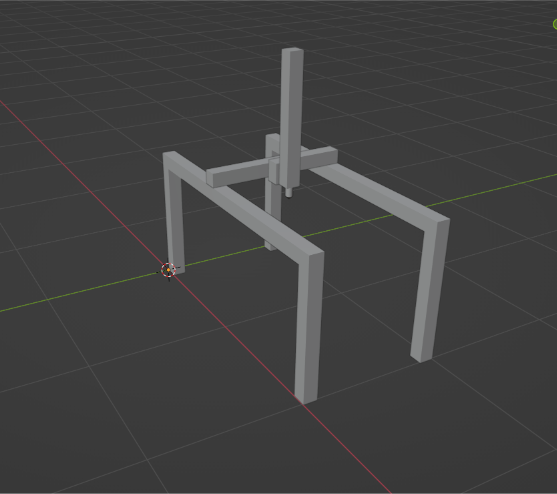
まずは、下図のような簡単な3軸直交ロボットをモデリング。
ベースとなる灰色の部材を含めて全部で5つの部材から構成される。
それぞれ、赤の部材がx軸移動、緑部材がy軸移動、青部材がz軸移動を担当する。
STLファイル出力
基本的に3DCGとして各種ソフトで扱う場合、slt形式やfbx形式などにする必要がある。
筆者が愛用しているsolidworksはstl出力を行えるので、いったんこのアセンブリをstl形式で保存。
Blender
Blenderでは、STLファイル⇒FBXファイルへの変換を行っていく。
STLファイルインポート
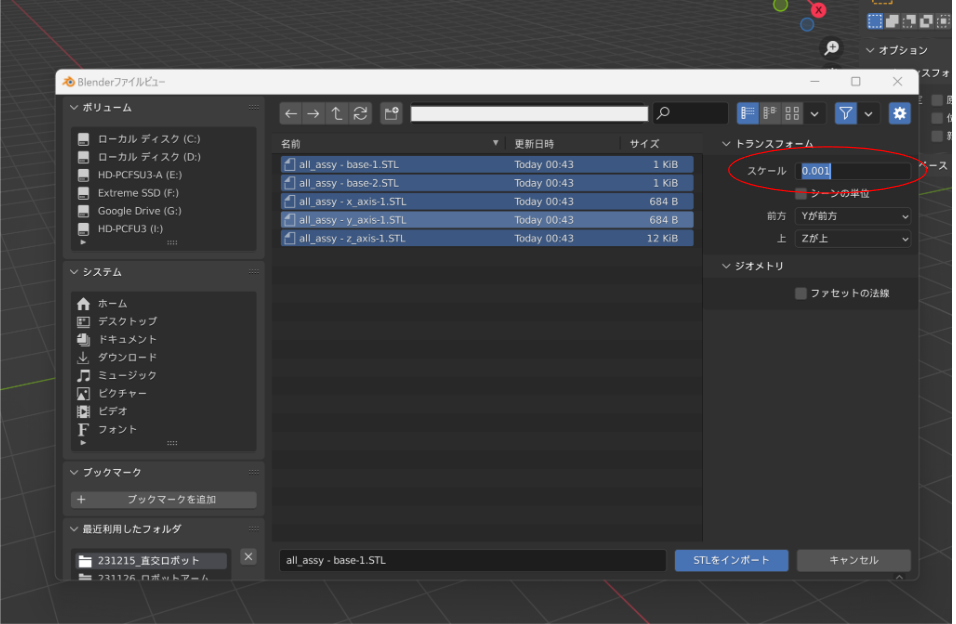
先ほどSolidworksで作成したstlファイル(全5種)をBlenderにインポートする。
インポートする際には、スケールを0.001とする必要がある。
これは、solidworks上ではmm単位で扱っているのに対して、blender上ではm単位で扱うことになるので、補正する必要があるためと思われる。(真面目に調べたわけではないが、経験上この方法をとっている)
インポートしたモデルが下図。
モデルの原点をz軸直下に設定したいので、少しいじっていく。
原点調整
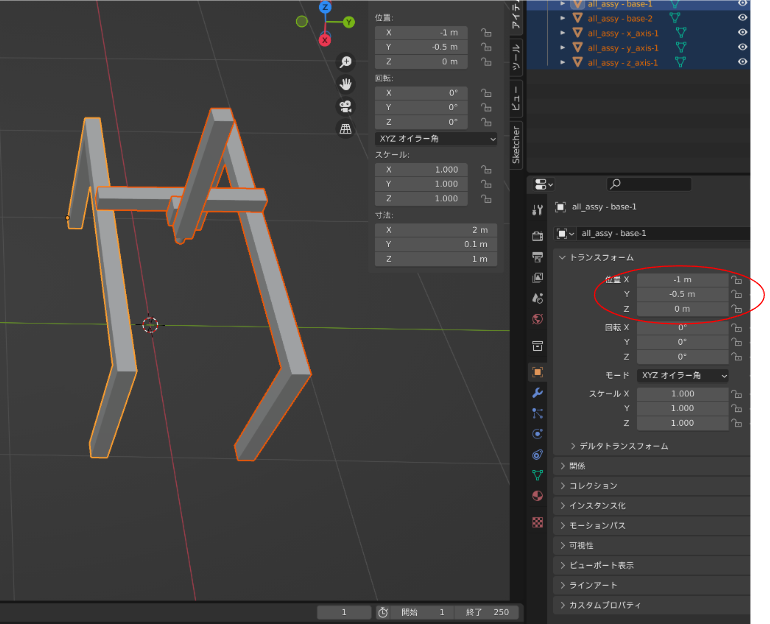
まずは、すべてのオブジェクトを選択して、z軸直下がワールド座標の原点直上に来るようにシフトさせる。
複数のオブジェクトを選択した状態で、Altキーを押しながらトランスフォームの入力欄を選択するとまとめてシフトできる。
ここでの数値は、Solidworksでモデリングしたときの値を参考に入力している。
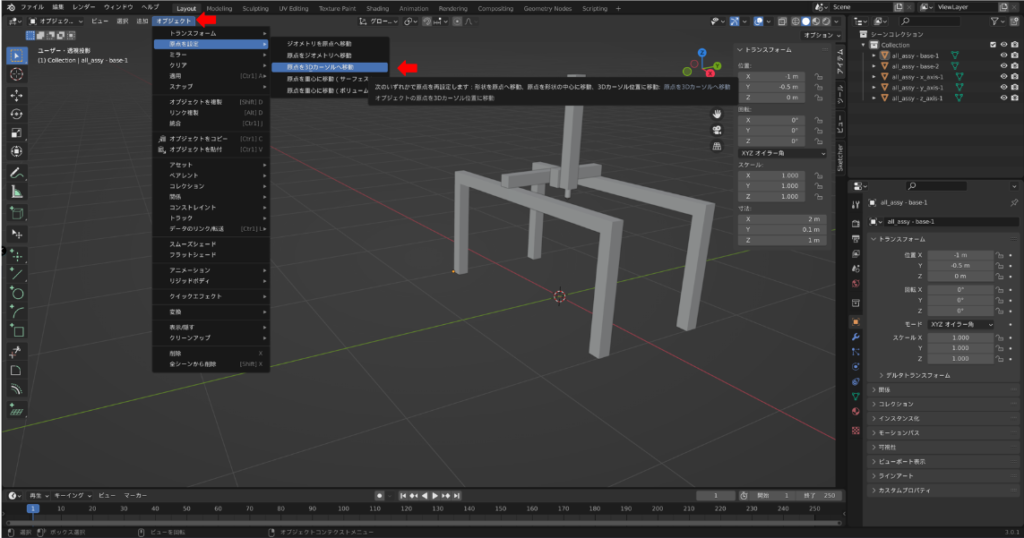
その後、『オブジェクト』⇒『原点を設定』⇒『原点を3Dカーソルへ移動』を選択。
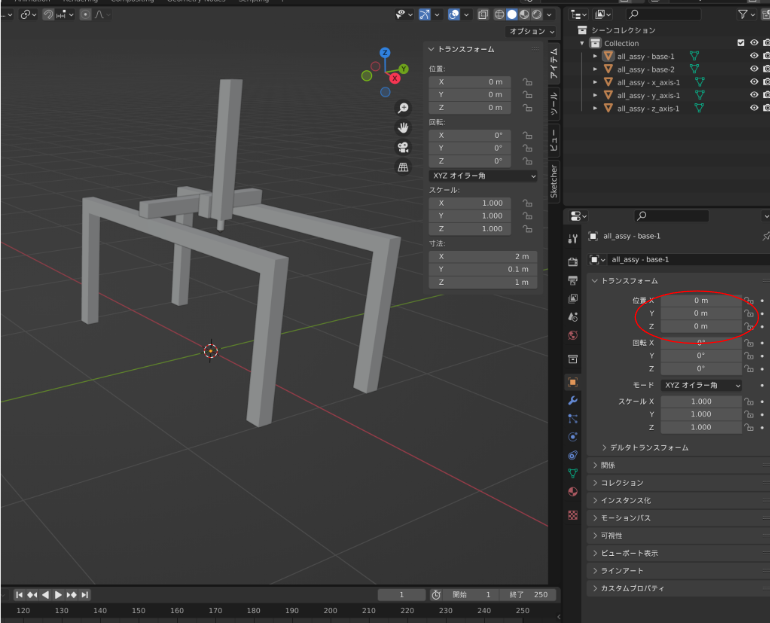
すると、ぱっと見の絵としては変化がないが、各座標が0となる。
これによって、原点移動が完了となる。
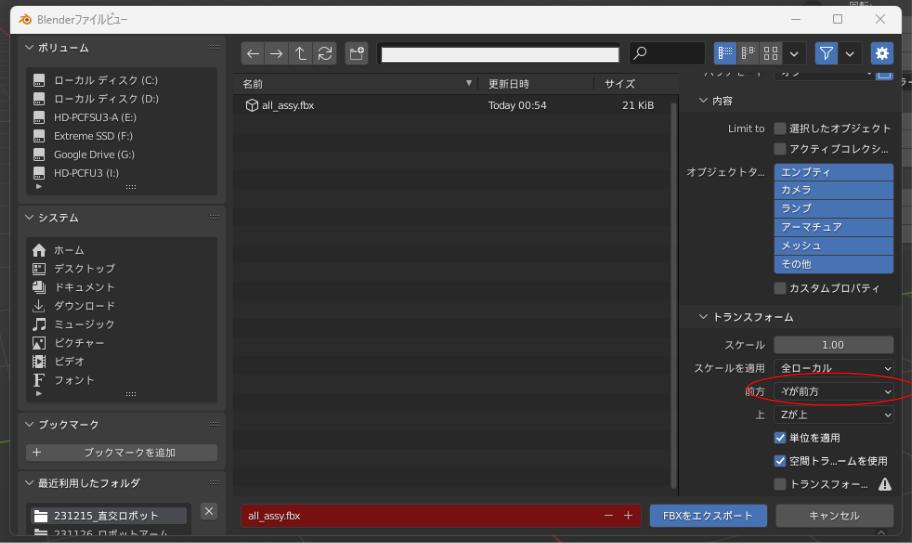
FBXファイル出力
この状態でfbxファイルとして出力する。
設定の際には、デフォルトで『Zが前方』となっていると思うので、『Yが前方』 or 『-Yが前方』としておくことで、上下方向がおかしくなることを避けられる。
『-Y』にするか『Y』にするかは正直XY方向の±が変わるだけなので、今回はあまり気にはしない。
これにて、UE5に取り込むためのデータの作成が完了。
次回は、UE5に取り込んで作業を進める。
次回