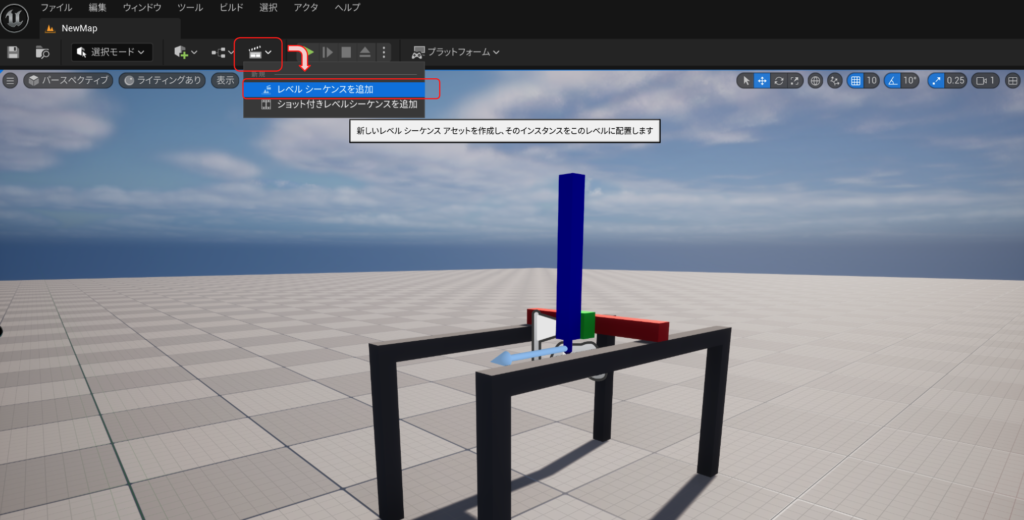
レベルシーケンスを追加
上部のアイコンから、『レベルシーケンスを追加』を選択。
適当な名前を付けて保存。
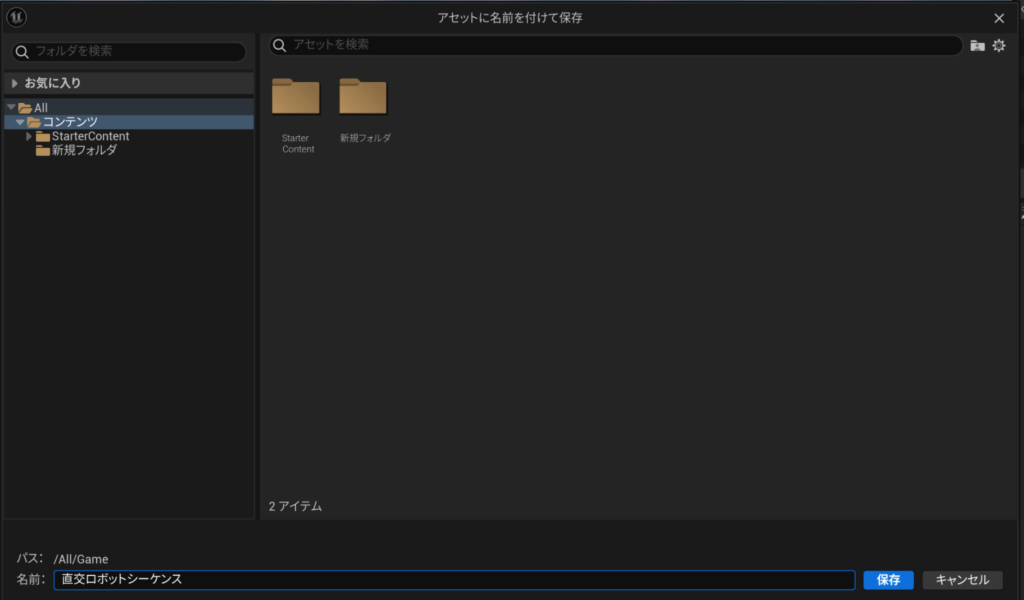
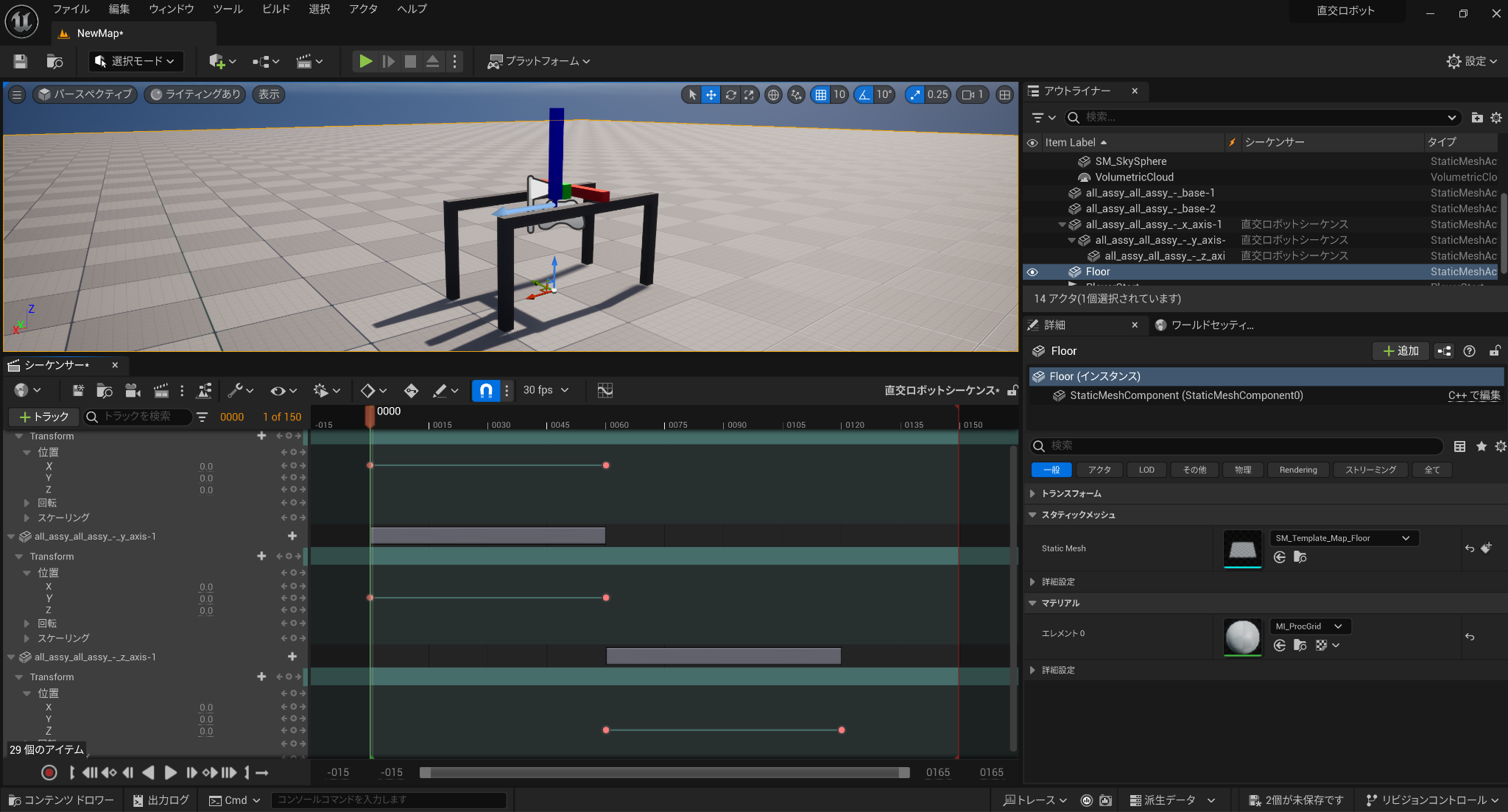
すると、ウィンドウの下部にシーケンサーが表示される。
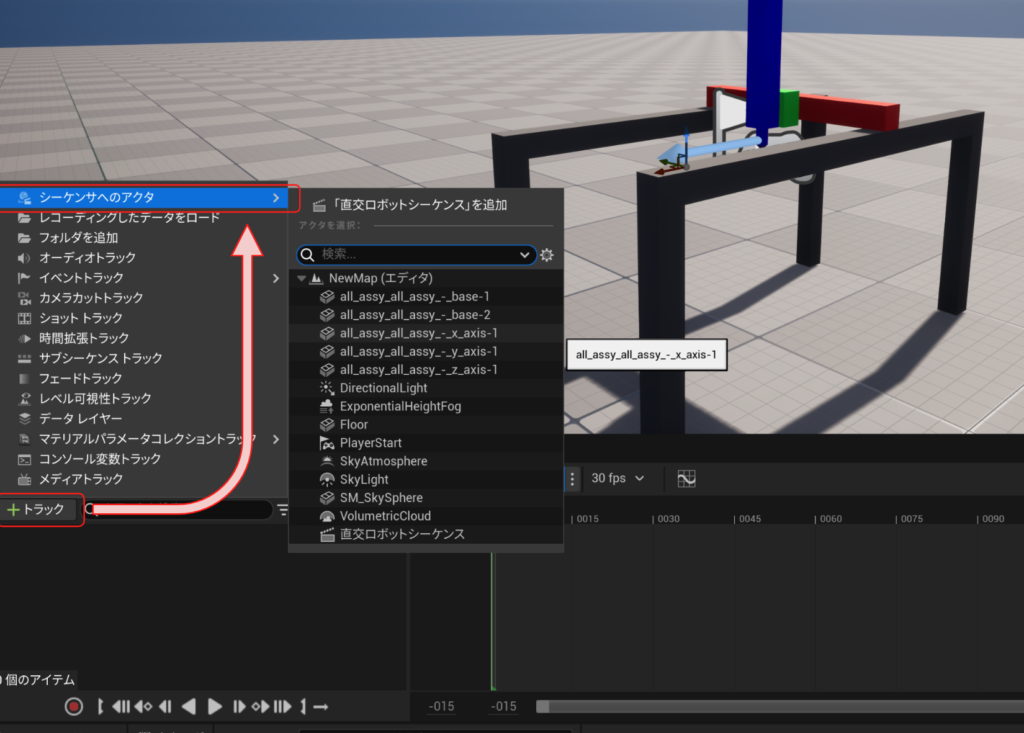
『+トラック』から『シーケンスへのアクタ』を選択し、動かしたいアクタ(ここではx軸部材)を選択する。
すると、シーケンサーにx軸部材のトラックが追加される。
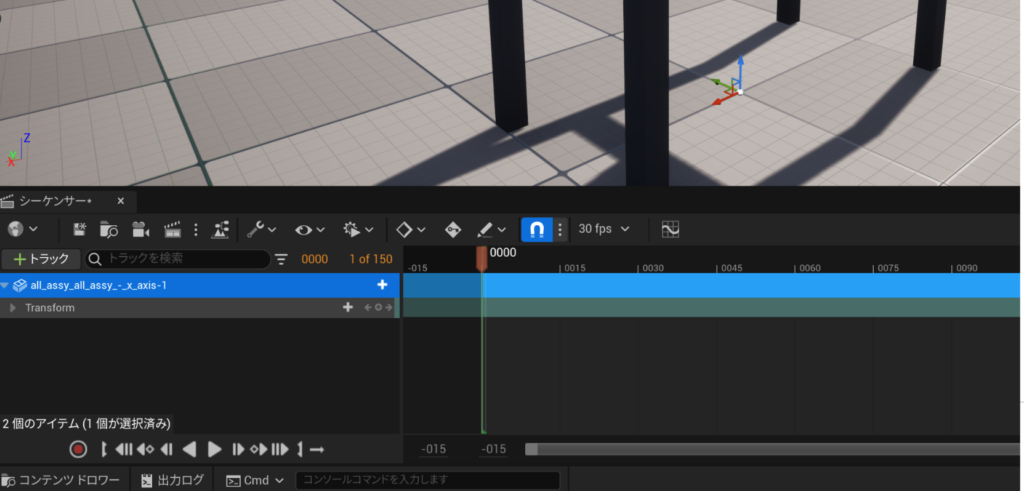
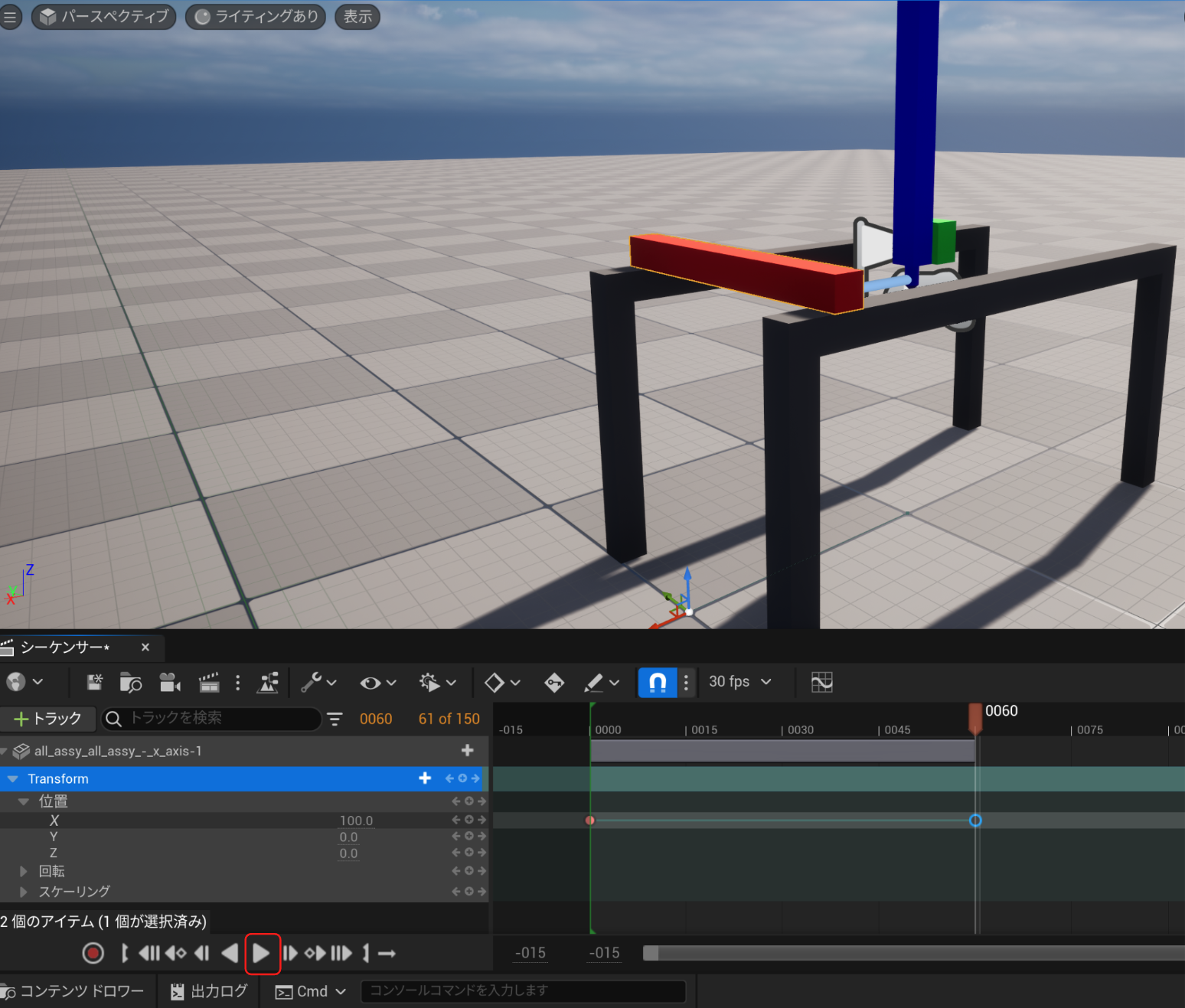
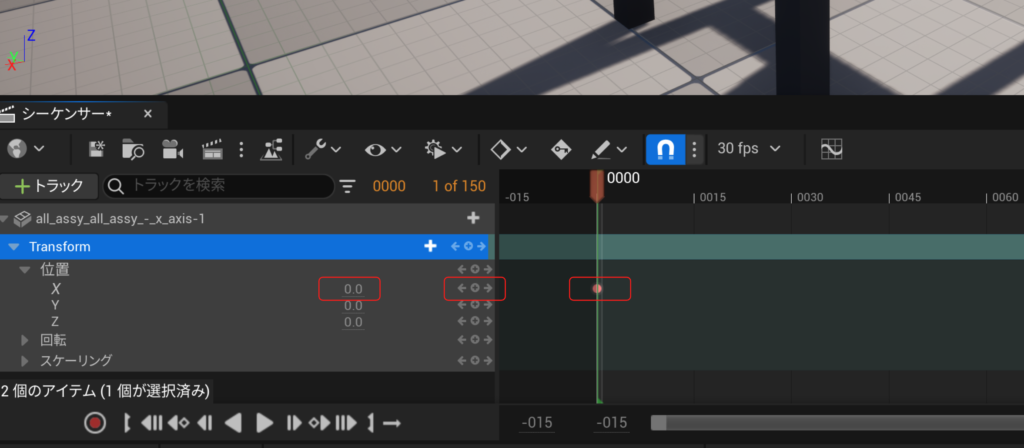
『▷Transform』の『▷』を選択すると、『位置』の項目が表示される。
ここで、Xの項目に関して、値が『0.0』となっている状態で、『⊕』を選択する。そうすると、タイムラインにキーが追加される。※図中の赤丸
タイムラインを60まで動かし、Xの値を『100』にして『⊕』を選択する。
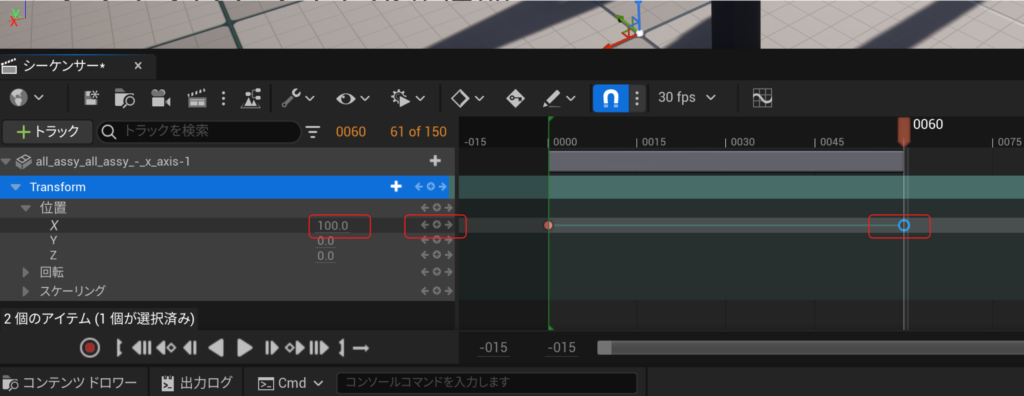
そうすると、Xに関して、0フレーム目から60フレーム目まで青い線で結ばれる。
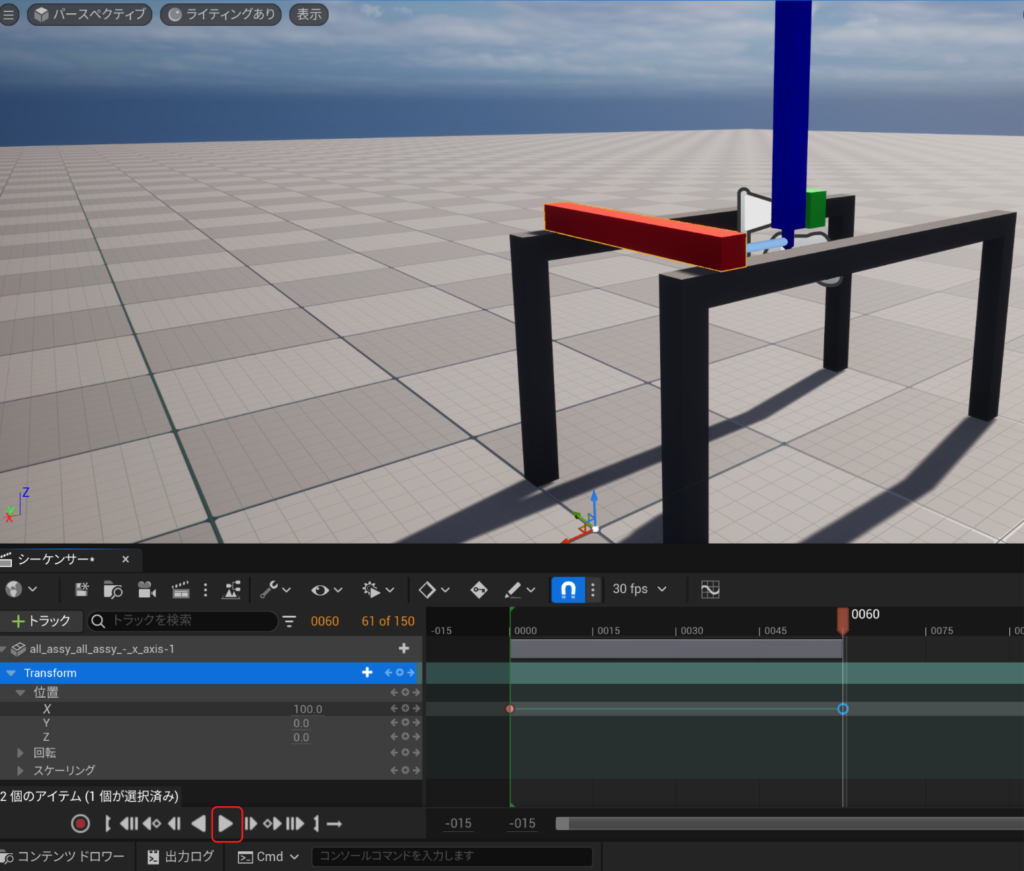
この状態で、シーケンサー左下の『▶』を押すとX部材が動くことが確認できる。
ただこのままだと、X軸の部材だけ動いてしまう。
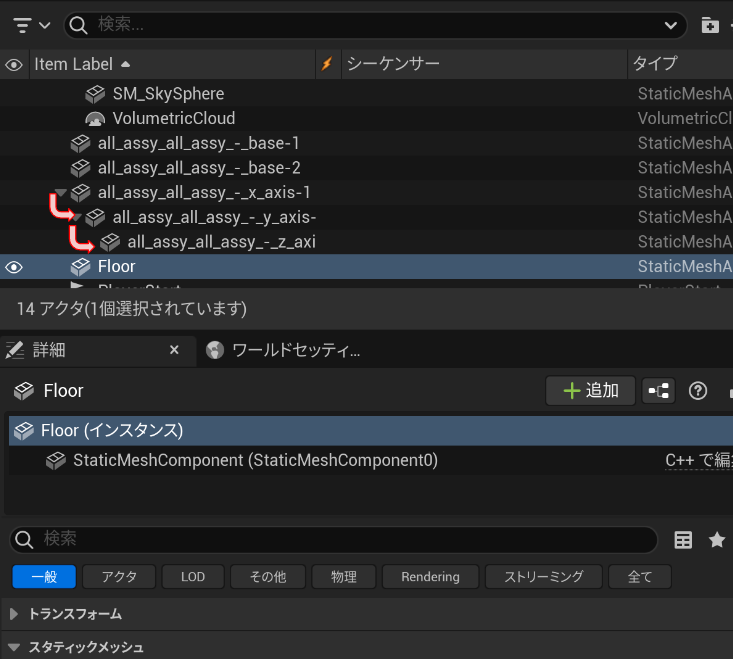
そこで、アウトライナー中のy軸部材をドラッグ&ドロップでx軸部材に紐づける。
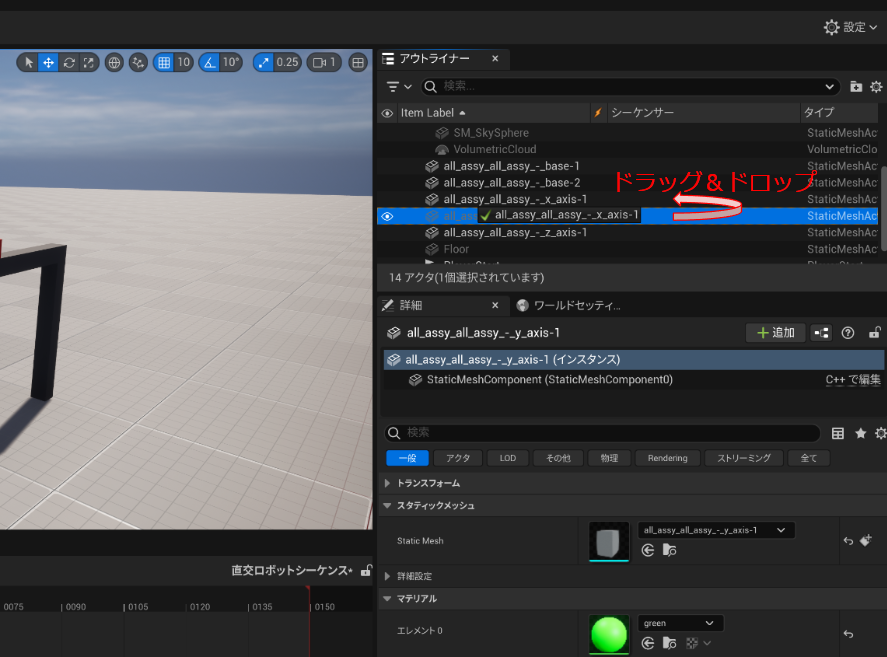
同様にz軸部材をy軸部材に紐づける。
こうすると、x軸を動かしたときにy,z軸も連動し、y軸を動かしたときにはz軸が連動する。
アニメーションで確認すると以下の通り、y,z軸部材も連動してくれいている。
シーケンサーで、Y、Zもアニメーションを設定していく。
実際に動作させると以下の通り。